Using Lidar point clouds for Orienteering base map generation
Added 31 May 2013: All the programs can be downloaded here!
Update 16 Aug 2013: Mindaugas Andrulis helped locate a bug where the
scripts failed if the Easting values required 7 digits.
This article is based on my work with the base maps for JWOC 2015 in
Rauland/Telemark Norway.
Laser scanning (Lidar) has caused a revolution in the quality of
base material available for mapping, up to now however this has
mostly been limited to defining a ground surface and then use it to
generate contours with a fairly heavy amount of smoothing. I.e. here
in Norway these contours, with 1 and 5 m intervals have been
available to mappers as SOSI or Shape files.
The latest versions of OCAD have incorporated a LAS processing
pipeline for Digital Elevation Model (DEM) and contour generation,
initially this sw scaled very badly so that it was impossible to
handle very large areas like I needed for the mountain areas in
Rauland: I had to split my map into about 25-30 separate blocks,
process them individually and then merge the results. This took a
very long time (several weeks) and resulted in a base map with
glitches in the contours along all the block boundaries. I spent
some time in 2012 looking over the OCAD source code, suggesting ways
to make it faster and/or scale better, and the latest updates to
OCAD 11 has implemented one of those approaches so that it is now
possible to import many sq kms of Lidar points.
In Sweden Jerker Boman wrote OL Laser
a few years ago, this program is free and it allows better control
of the contour generation process. It can also generate slope angle
images and detect very steep areas as possible cliffs. Jerker
implemented a batch processing pipeline for OL Laser so that it
could be used for big jobs, but I had some stability problems and
the boundary glitch problem remains.
Over in Finland Jarkko Ryyppö (of RouteGadget fame) made a big
breakthrough with his "Map Machine" (Karttapullautin)
which handles everything from the input Lidar data to a finished
training map image which can be used as-is.
The solution I ended up with was to use the free LAStools programs developed by Martin Isenburg: Martin is the
inventor of the LAZ format which can compress Lidar data by almost
an order of magnitude, the reference implementation of the
compression algorithm has been published as open source. LAZ is the
format which is being used by most countries who have started to
publish their Lidar databases, like Finland and the US.
Martin has written a set of extremely efficient utility programs
(for Windows) that can be used freely by individuals and
non-profit organizations to perform advanced Lidar processing on
smaller data sets, I ended up using a few of his programs in a batch
pipeline, with several helper programs written in perl that control
the process and perform any extra processing. (I used the free
Windows perl version from Activestate.com
since it has very good library support.)
lidar-batch.bat
This batch file is started from the command line, from the directory
where all the finished files should be generated, i.e. if all the
LAZ files are located in the "base" subdirectory of the "norefjell"
directory, the relevant command would be something like this:
c:\data\norefjell>lidar-batch base\*.laz
The result after a few minutes (depending upon project size) is a
set of .dxf and .asc files ready for import into OCAD along with a
set of Background Map images as detailed below.
Batch processing stages
Tiling the input data
lastile takes a set of las/laz files and splits them into individual
tiles, each is sized 250x250 m, with a guard buffer of 35 m around
all the sides, i.e. each tile will contain all the points from a
320x320 m square. The boundary area is very important since it
allows all the subsequent operations to work independently while
avoiding glitches or artifacts along the tile boundaries!
lastile -i %1 -tile_size 250 -buffer 35 -o tiles_raw\tile
-olaz
Ground point determination
Here in Norway Lidar point clouds have already been classified as
either Ground or Non-ground so I can use them as-is, otherwise
LAStools has the lasground program which can do a pretty good job of
figuring out what is ground and what isn't. (If your Lidar files
haven't been ground classified you can use lidar-batch-ground.bat
instead, this batch file adds an extra stage using lasground.exe to
differentiate between ground and non-ground points.)
Lidar Vegetation Classification
The LAS standard has classifications for 4 different heights, i.e.
Ground (2), Low Vegetation (3), Medium Vegetation (4) and High
Vegetation (5), but with no fixed specification of which heights
belong in each class, i.e. this is up to us as mappers to determine.
For orienteering any points less than 30 cm above the ground will
probably be noise in the form of low heather or tufts of grass,
while any brush that is less than about chest height will impact
runnability but not visibility so I chose to classify all points
between 0.3 and 1.3 m as Low Vegetation.
Medium Vegetation is where the forest becomes dense, for both
runability and visibility, so it determines where the map should
have various levels of green, after some experimentation I ended up
with the range 1.3 to 4.0 m for this class.
High Vegetation is everything above this, an area with only Ground
and High Veg returns should normally be mapped as baseline white
forest.
The LAStools program lasheight is used to perform this
classification (I also drop any spurious points below -5 m and above
+100 m):
lasheight -i tiles_raw\tile*.laz -drop_below -5 -drop_above
100 -classify_between 0.3 1.2 3 -classify_between 1.2 4 4
-classify_between 4 100 5 -odir tiles_classified -olaz -cores 4
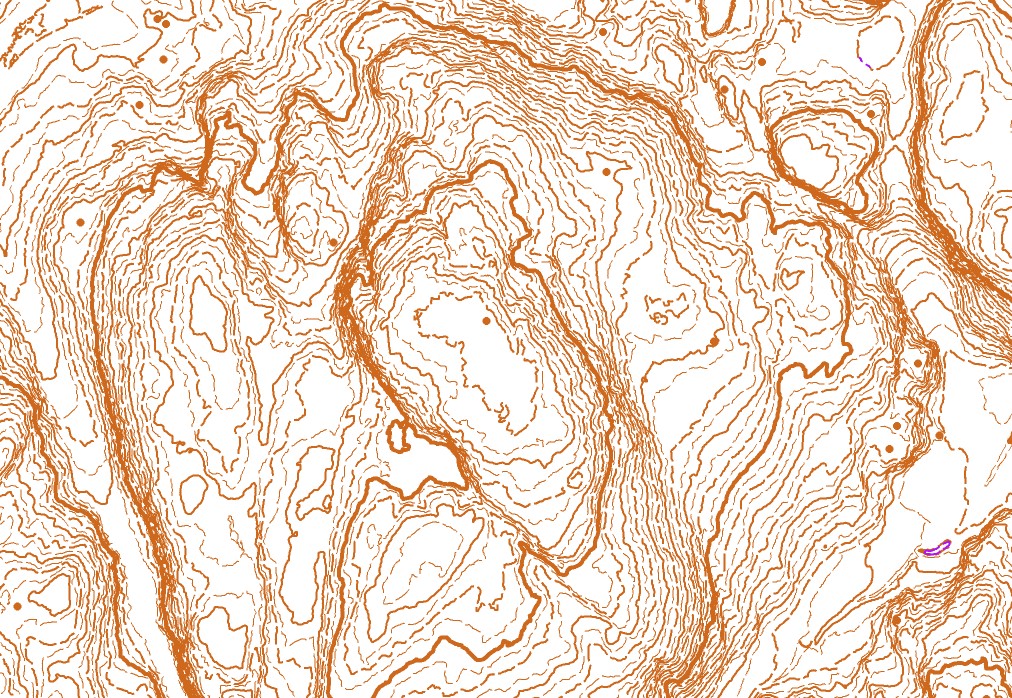
Contours, dot knolls and depressions
LAStools contains las2iso which can generate contour lines of
several types and formats, I wrote a wrapper program in perl that
calls las2iso to generate contours every 25 cm, which might seem
excessive, but the idea is to first generate a very dense set of
contour lines, then look for triple rings, i.e. contour loops that
contain exactly two internal loops:
gen-dxf-iso-dep.pl -cores 4 -force tiles_classified\tile*.laz
 Such a
triple ring can either indicate a low knoll (if the contours have
increasing altitude) or a depression (if they drop down). I use the
size of the outermost loop to determine if and how the knoll or
depression should be mapped: A dot knoll has to be below a maximum
size, otherwise it should be mapped with regular contours, while for
a depression the size determines if it can be shown with a
(negative) contour plus slope line(s) or as a point depression.
Such a
triple ring can either indicate a low knoll (if the contours have
increasing altitude) or a depression (if they drop down). I use the
size of the outermost loop to determine if and how the knoll or
depression should be mapped: A dot knoll has to be below a maximum
size, otherwise it should be mapped with regular contours, while for
a depression the size determines if it can be shown with a
(negative) contour plus slope line(s) or as a point depression.
After this stage I remove all contours that should not end up on the
final base map. By default I generate 4 classes of contours (25 m
index, 5 m normal, 2.5 m form line and 1.25 m extra form line) since
this makes it easy to hide/reveal one or more class. The number of
contour classes and intervals between them can of course be
configured, as long as they are all a multiple of the baseline 25 cm
set.
Before I merge the individual tiles together I crop each set of
contours so that only the central 250x250 m is left, then after
merging I look for and splice together all contour segments that
cross a tile boundary, i.e. making sure that each contour line will
be a single OCAD object.
The result of this processing is a file named by the map project
directory name with the suffix "_contours.dxf", i.e.
"norefjell_contours.dxf" for the Norefjell project, along with a
"norefjell_contours.crt" file which describes the mapping from DXF
to OCAD object types.
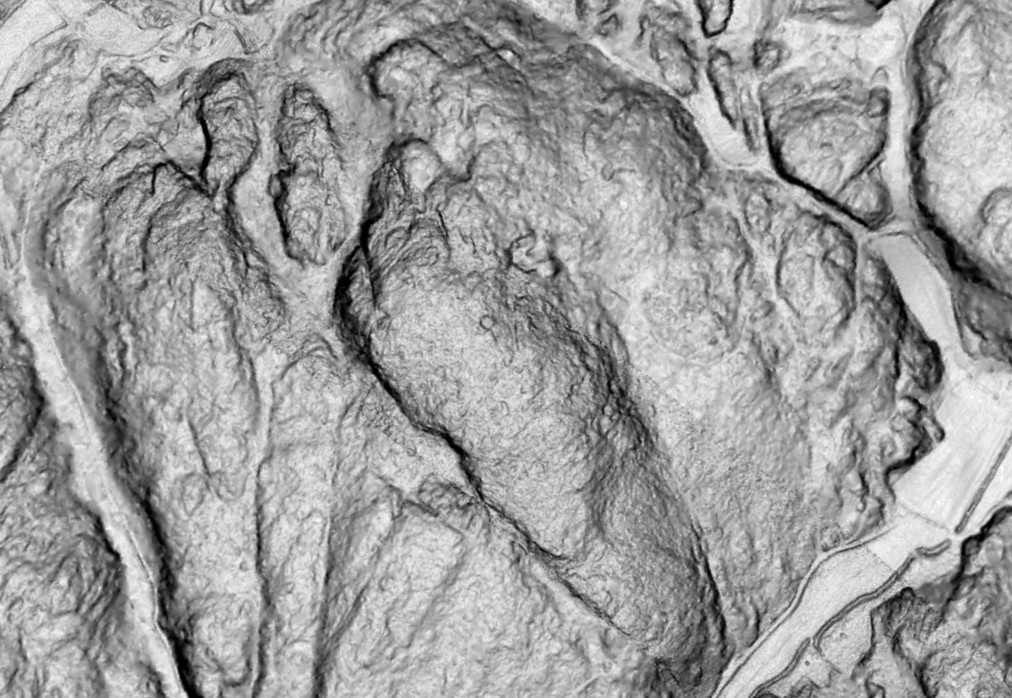
Digital Elevation Model and slope angles
las2dem is called from another perl program in order to generate
tile-based DEM and slope files in .ASC format, merging the tile
results into
a single elevation ASC file (which OCAD knows how to import) and a
grey-scale slope file in GIF format (plus a GFW georeferencing
"world file" so that the background image will end up in the correct
spot).
gen-slope-asc.pl -cores 4 tiles_classified\tile*.laz
The results are files named with
"norefjell_elevation.asc" for the DEM data and "norefjell_slope.gif"
for the slope angles.
The slope angle data is also used to generate a set of 4 black &
white cliff images (cliff, cliff1, cliff2, cliff3):
If the vertical drop is steep enough it is shown as a black cliff,
otherwise as white background:
- cliff3 corresponds to 3+ m vertical drop
over 1 m horizontal distance,
- cliff2 is for 2-3 m drops and
- cliff1 for 1-2 m,
- while the "norefjell_cliff.gif" image is
the sum of these three, i.e. any drop above 1 m.
Any of these images can be loaded as a transparent background map.
Vegetation classification for Orienteering
I use las2txt in pipeline modus in order to convert each compressed
binary .laz tile into text format, then I accumulate the number of
points from each of the four relevant classes (Ground/Low/Med/High
Veg) that hit in each 2x2 m square. After trying many different
classifiers I ended up with a model where I look for the 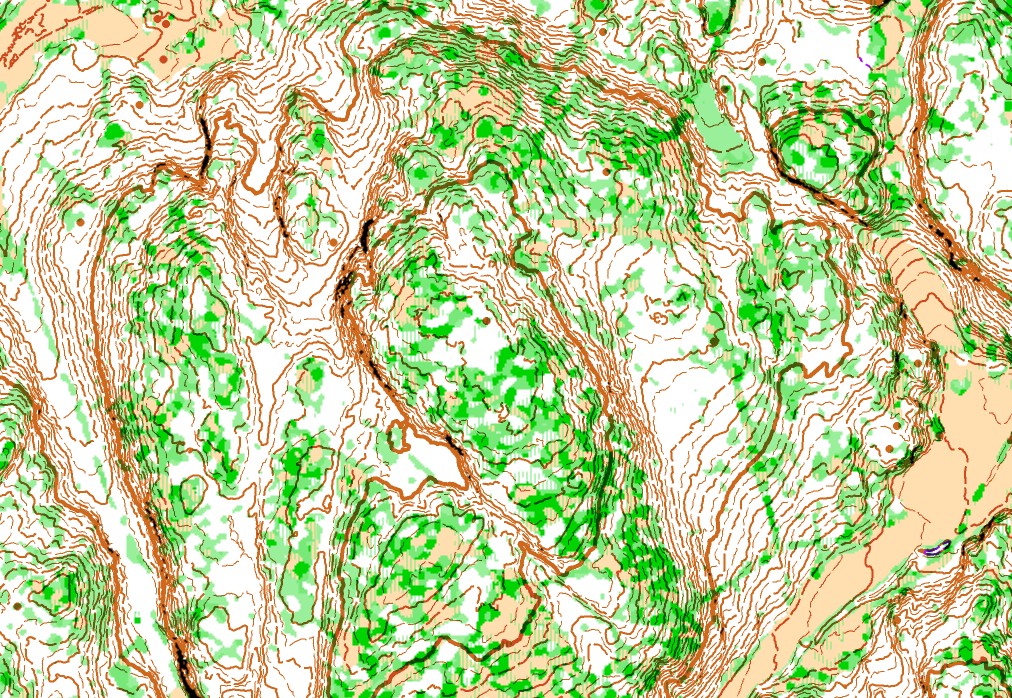 relative distribution of points in each height group.
In order to get significant results I needed to average the
distribution over a circle centered on each square, the averaging is
weighted so that the central points are more significant, dropping
down to zero about 5 m away.
relative distribution of points in each height group.
In order to get significant results I needed to average the
distribution over a circle centered on each square, the averaging is
weighted so that the central points are more significant, dropping
down to zero about 5 m away.
gen-laz-vegm.pl -cores 4 tiles_classified\tile*.laz
The results of this can be very noisy, changing classification for
every 2x2 m block, so I have to filter them with a second
low-frequency pass, this was based on an idea from Jarkko Ryyppö's
mapping generator which also employs a two-stage process.
In my code I use a simple majority vote for a center-weighted area
around each block: Whichever classification is most common wins.
The result is named "norefjell_vegetation.gif"
Vegetation classification feedback
Initially the various classes (white/yellow/stripe
green/light/medium/dark green) is based on a set of trial-and-error
tests I made, but after the first few surveying trips in the forest
I found a general way to improve this:
I picked a number of locations in the forest that were typical for
the various classifications, then put those benchmark spots into a
specific file:
611548,6546040,G
611626,6546550,Y
611736,6546450,W
611958,6546282,DG
612116,6546686,WS
...
"vegetasjon_facit.txt"
The codes stands for Green, Yellow, White, Dark Green and White with
green Stripes. I can also use LG and YS for Light Green and Yellow
with green Stripes.
If this file exists in the current directory the perl program will
pick it up: On the first processing run the statistical distribution
for each of the benchmark areas is calculated and the
"vegetasjon_facit.txt" is updated, appending the percentage of each
type of return (Ground/Low/Medium/High).
On subsequent runs these benchmark values are used, so that for each
2x2m spot in the terrain it will look for the benchmark spot which
is most similar and use that classification. It is of course
possible to iterate this process, so when you find one or more areas
that are wrongly classified, they can be added to the benchmark file
before restarting the gen-laz-vegm.pl program.
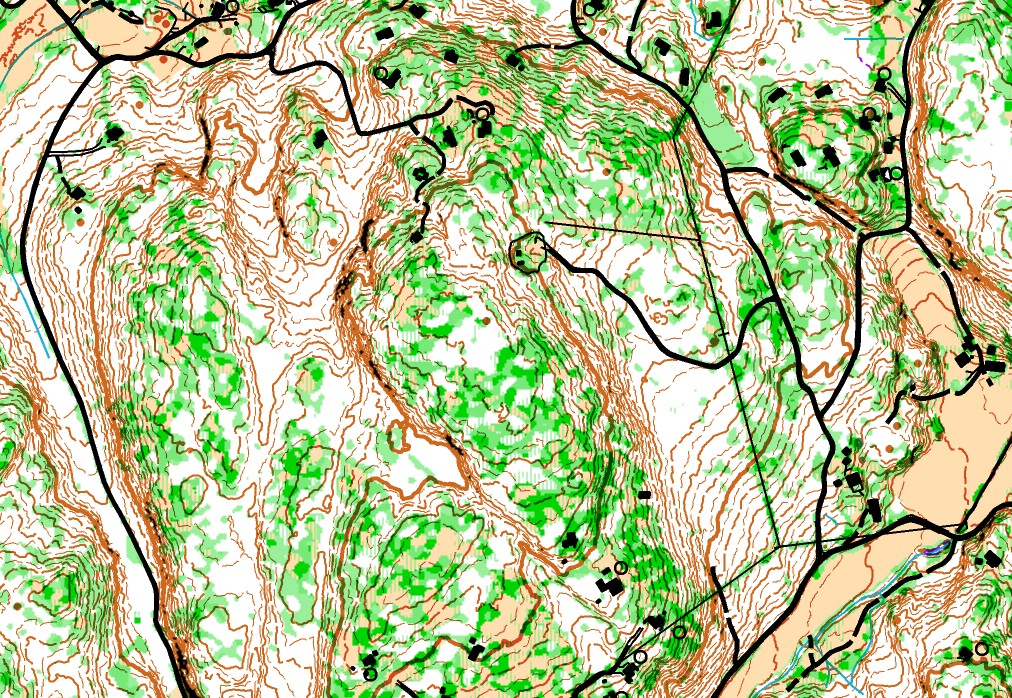
Adding public mapping data
Norwegian mapping data is stored in the SOSI format, this is a
text-based format which (as far as I know) is used only in Norway.
It is however very self-descriptive, with all coordinates stored in
UTM with cm resolution, so it was fairly easy to write a sosi2dxf.pl
program which converts most object types to the corresponding OCAD
objects.
I received a lot of help from Gian-Reto Schaad (from OCAD AG) here,
coming up with several improvements to the DXF import process so
that I can get elevation data for any line or point object (like
contour lines and dot knolls) as well making it possible to import
area objects which contains holes, i.e. a lake with one or more
islands.
Adding this results in vector data for roads, buildings, some area
use boundaries, power lines, rivers and creeks as well as some
paths. At this point the base map is ready for field surveying:
All the programs I have developed and listed here
are hereby released for free use/modification by anyone interested
in orienteering mapping. I would appreciate getting an email with a
copy of any map generated this way!
Oslo, May 30 2013
Terje Mathisen
terje.mathisen(at)tmsw.no
PS. All the map samples shown are from a separate project, mapping
the Hvaler archipelago in the Oslo fjord. See Asmaløy and Hvaler for the work in progress.